
%%capture
! pip install -U ovitoRecipe 1: Simple import and visualization
How to Script with OVITO
![]()
Import OVITO modules
First we need to import the io and vis modules to create the necessary pipeline, Viewport, and render.
from ovito.io import import_file, export_file
from ovito.vis import Viewport
from ovito.vis import TachyonRenderer, OSPRayRenderer, OpenGLRendererStep 1: Import the LAMMPS dump file
Here we download a LAMMPS data configuration file format and then import it to create a OVITO pipeline. You can think of pipelines as workflows or steps that get applied to a imported file. The add_to_scene method just creates flag to make sure this pipeline gets included in visualization.
%%capture
!wget 'https://drive.google.com/uc?id=1uN3r_QeKvCi-d5ry16zr9VTVa0SpXuM2&export=download' -O data.FCC-C60-Pillar
pipeline = import_file('data.FCC-C60-Pillar',input_format='lammps/data')
pipeline.add_to_scene()Step 2: Create a viewport
A Viewport object is what you would see if you used the GUI version of OVITO. We will specify the type as being a Orthographic Projection and then we can state the vector for the camera view should be. Finally we zoom in to fit the the view port.
Much of this is a bit of an iterative process, because you need to toggle it, check the rendered image, and then adjust as desired.
viewport = Viewport(type=Viewport.Type.Ortho, camera_dir=(2, 1, -1))
viewport.zoom_all()Step 3: Render the scene & display
Now we specify the arguments for the method render_image of the Viewport which includes the renderer object itself.
render_args = {
'filename': 'FCC-C60-Pillar.png',
'background': (1.0, 1.0, 1.0),
'renderer': OSPRayRenderer() # Or use another renderer
}
viewport.render_image(**render_args);
Note
We just use the code below to display an image in a notebook.
from IPython.display import Image
fname = 'FCC-C60-Pillar.png'
Image(open(fname, 'rb').read())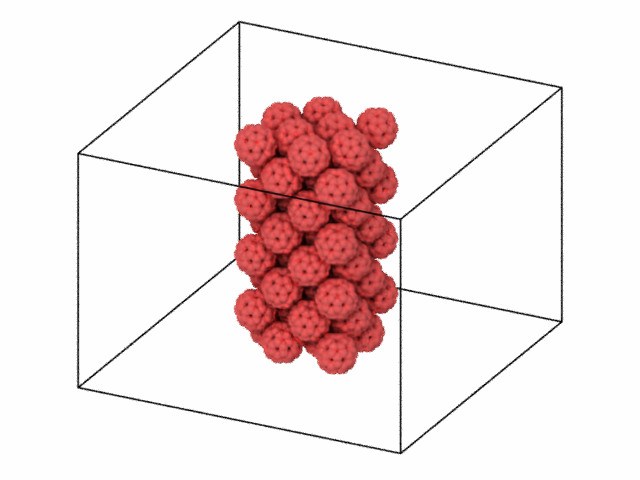
Optional: Save a 3D Model
A nice feature is we can save a 3D model representation of our frame/viewport and then manipulate it in real-time in a browser or powerpoint.
export_file(pipeline,file="FCC-C60-Pillar.glb",format="gltf")Citation
BibTeX citation:
@online{bringuier2024,
author = {Bringuier, Stefan},
publisher = {Github Pages},
title = {Recipe 1: {Simple} Import and Visualization},
date = {2024-02-22},
url = {https://stefanbringuier.github.io/HowToSOVITO},
langid = {en}
}